reach
REACH
![]()
![]()
Robotic Evaluation And Comparison Heuristic
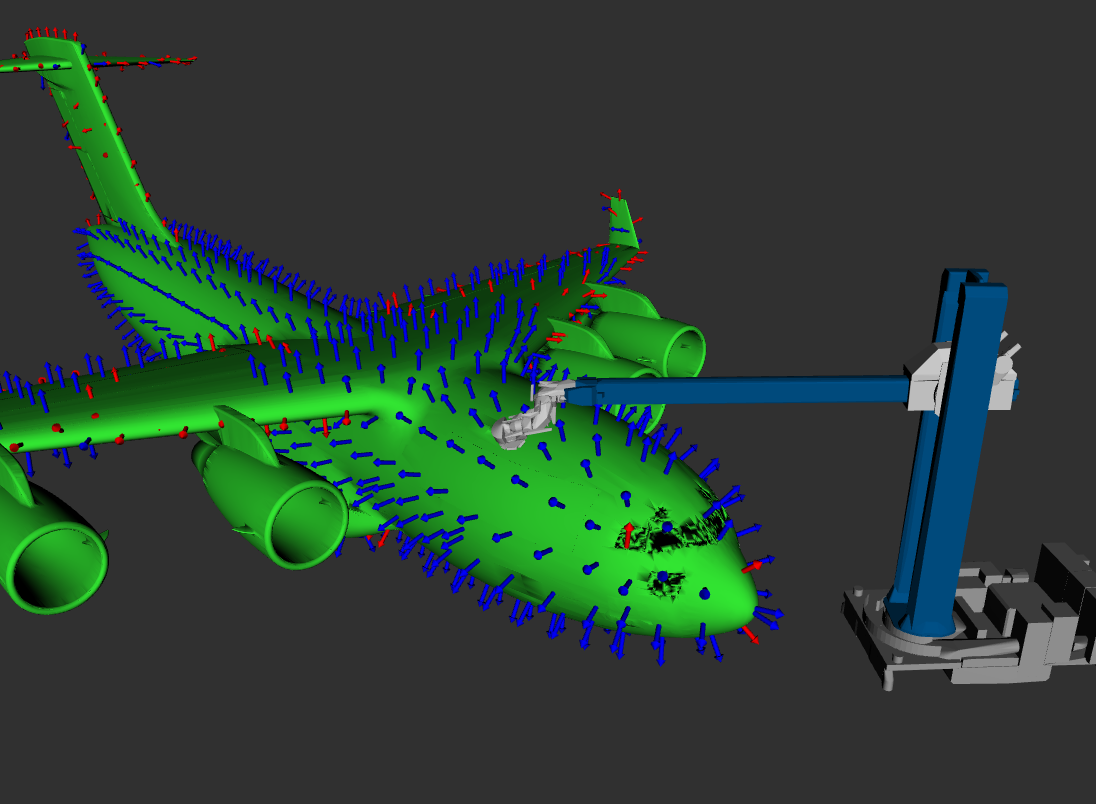
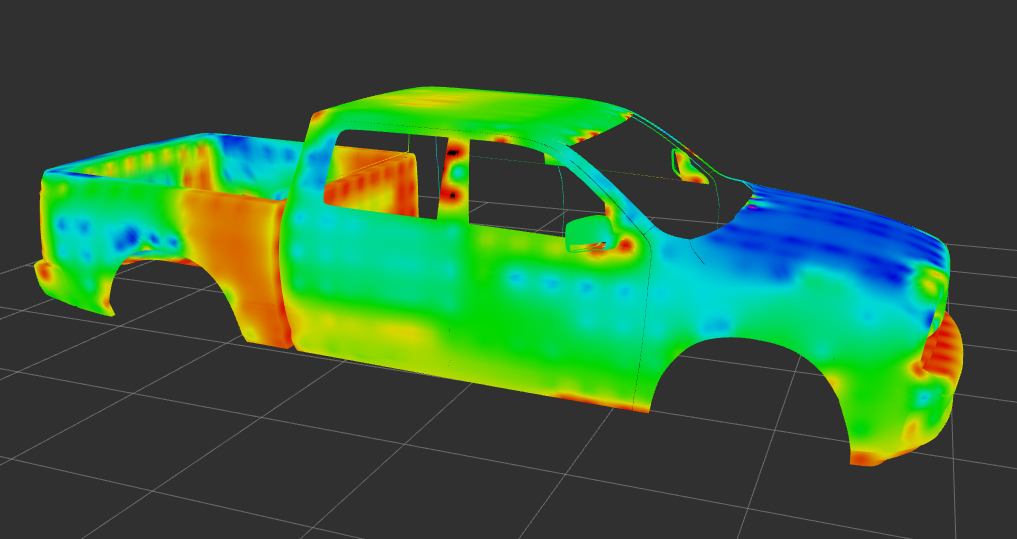
Table of Contents
Description
The REACH repository is a tool that allows users to visualize and quantitatively evaluate the reach capability of a robot system for a given workpiece. See the ROSCon 2019 presentation and video for a more detailed explanation of the reach study concept and approach.
Supported OS Distros
| OS | Support | | :— | :—: | | Ubuntu Focal | ✓ | | Ubuntu Jammy | ✓ |
Structure
reach is a ROS-independent package that provides the framework for the reach study process, defined in the diagram below:
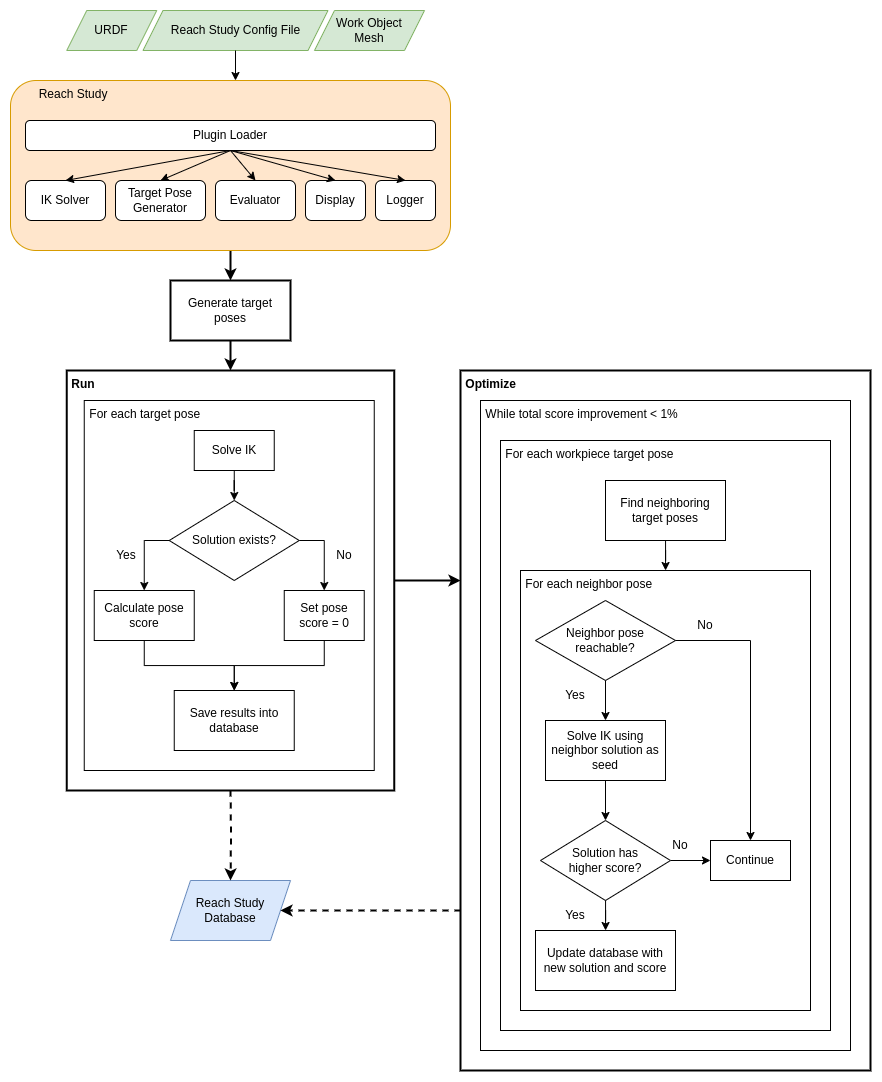
The reach package also provides the interface definition for the required reach study functions:
TargetPoseGenerator- Generates Cartesian target poses that the robot should attempt to reach during the reach study
- These target poses are expected to be relative to the kinematic base frame of the robot
- The z-axis of the target poses is expected to oppose the z-axis of the robot kinematic tip frame
IKSolver- Calculates the inverse kinematics solution for the robot at an input 6 degree-of-freedom Cartesian target
Evaluator- Calculates a numerical “fitness” score of an IK solution (i.e., robot joint pose) at a given Cartesian target pose
- Higher values indicate better reachability
- Example numerical measures of reachability include manipulability, distance from closest collision, etc.
Display- Visualizes the robot/reach study environment, target Cartesian poses, IK solutions, and reach study results
Logger- Logs messages about the status and progress of the reach study
Plugins
The interfaces described above are exposed as plugins using the boost_plugin_loader library to support custom implementations.
Several default and dummy plugins have been created in the reach package.
Many other ROS-based plugins have been implemented in the reach_ros and reach_ros2 packages.
All of the plugins built in this project are discovered automatically by the plugin loader without additional manual steps.
The plugin loader class finds plugin libraries using two environment variables:
LD_LIBRARY_PATH- The plugin loader searches for libraries containing plugins within the directories defined in the
LD_LIBRARY_PATHenvironment variable. - When using a ROS-based build tool such as
catkinorcolconthis variable is set automatically to include both system level and workspace level folders by sourcing<devel|install>/setup.bash
- The plugin loader searches for libraries containing plugins within the directories defined in the
REACH_PLUGINS:- The plugin loader then looks for libraries with names defined by the environment variable
REACH_PLUGINSwithin the directories specified by the environment variableLD_LIBRARY_PATH. - The names of these libraries should not include a prefix (e.g.,
lib) or a suffix (e.g.,.so) and should be separated by a colon (:). - This variable must be set manually to specify plugin libraries not built in this project
- The plugin loader then looks for libraries with names defined by the environment variable
If custom libraries created outside this project (for example libmy_custom_reach_plugins.so and libcool_reach_plugins.so) contain REACH plugins, make those plugin libraries visible to the plugin loader by setting the REACH_PLUGINS environment variable as follows:
export REACH_PLUGINS=my_custom_reach_plugins:cool_reach_plugins
Installation
Nominally, the reach package is ROS-independent, but it is convenient to use the ROS dependency management and build tools to build the package.
First, clone the repository into a catkin workspace
cd ~/reach_ws/src
git clone https://github.com/ros-industrial/reach.git
cd ..
Install the dependencies
vcs import src < src/reach/dependencies.repos
rosdep install --from-paths src --ignore-src -r -y
Build the repository
<catkin/colcon> build
ROS Integration
See the reach_ros and reach_ros2 repositories for ROS-based plugins, capability demos, and general usage instructions.
Tips
- Ensure the object mesh and reach target position scales match and are correct (visualize in
rviz). It is common to be off by a factor of 1000. - If a set of robot links are allowed to collide with the mesh, add their names to the
touch_linksfield of theMoveItIKSolverplugin in the reach study configuration file. - The selection of IK solver is key to the performance of the reach study. Gradient-based solvers (such as KDL and TRAC-IK) are typically good choices.
- Additional constraints (or lack thereof, such as orientation freedom about the tool z-axis) can also be incorporated into the IK solver (via parameters or source code changes) to produce different reach study results
- For
MoveIt-based plugins, the selection of IK solver is defined in thekinematics.yamlfile
- Reach study results are serialized to file and can be loaded using the API in
reachfor programmatic analysis or modification - You can specify a starting seed for the IK solver by providing a list of joint positions in the config. This be used to help the IK solver to find solutions for complex scenarios. It might also help to guide the solver to solutions that are closer to a certain configuration that you prefere. If no initial seed is provided, a pose with all joints at 0 position is used.