|
Noether
0.0.0
|
|
Noether
0.0.0
|
Implementations of the noether::EdgePlanner interface. More...
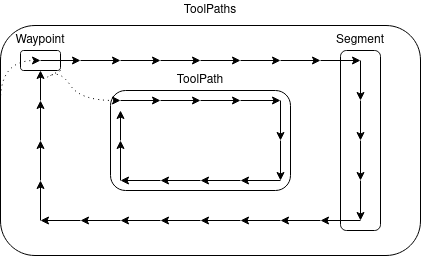
An noether::EdgePlanner is a subclass of noether::ToolPathPlanner with the following general properties:
The organization of tool path waypoints, segments, and paths in the output of an edge planner is shown in the following diagram:
Classes | |
| class | noether::BoundaryEdgePlanner |
| Edge tool path planner that creates paths around the boundary edges of a mesh (exterior and interior) as identified by half-edge triangle mesh representation of the mesh. More... | |