|
Noether
0.0.0
|
|
Noether
0.0.0
|
Nominally, this project is ROS-independent, but it is convenient to use the ROS dependency management and build tools to build the repository.
Clone the repository into a workspace, download the dependencies, and build the workspace.
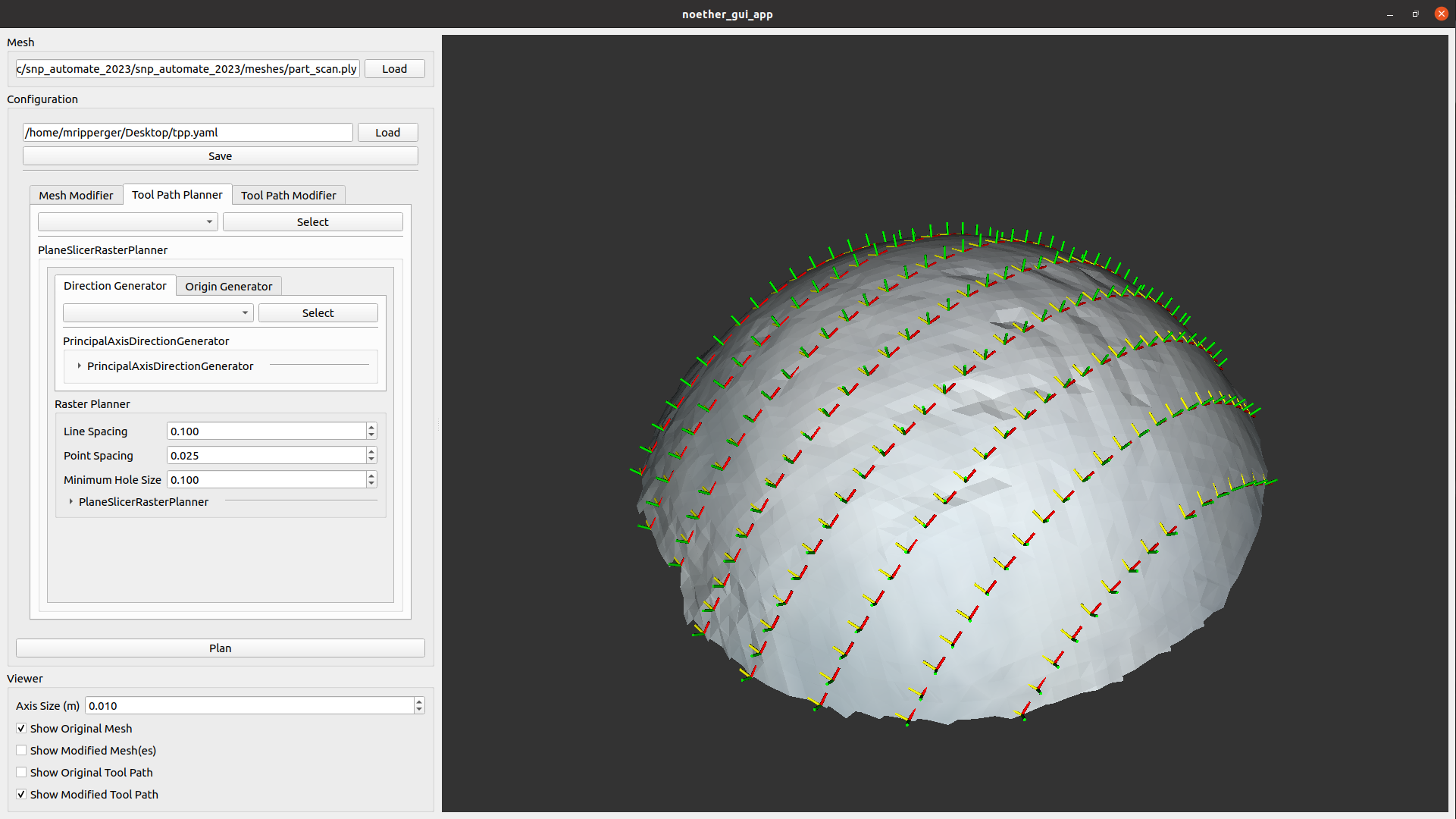
This project provides a GUI for configuring and operating a Tool Path Planning Pipeline.
Run the application from the workspace install directory using the following command:
or alternatively using ROS 2:
This project also provides a CLI utility for generating meshes for various types of shape primitives (e.g., plane, ellipsoid, cylinder, etc.). See Mesh Generation for Shape Primitives for more details on the functions available for generating meshes for shape primitives.
Run this application from the workspace install directory using the following command:
or alternatively using ROS 2:
More information about the required parameters can be found by running:
or