|
Noether
0.0.0
|
|
Noether
0.0.0
|
We define tool path planning as the generation of an ordered set of waypoints for a robotic process (e.g., painting, sanding, inspection, routing, etc.) based an input mesh geometry. The idea is that the tool of the robot should traverse through this set of waypoints in order to accomplish the desired task.
Definitions of the concepts of waypoints and tool paths can be found in Types.
We think of the tool path planning process as a pipeline consisting of 3 steps:
The sections below describe each of these conceptual steps in greater detail. The ToolPathPlannerPipeline class combines these three steps into a single class that can be used to streamline tool path generation.
Often input geometry (specifically meshes) does not actually reflect the surface from which we want to generate tool paths. Usually we want to process the mesh in various ways, such as smoothing, segmentation, or primitive fitting and projection. A MeshModifier receives a single input mesh, applies these modification operations, and returns at least one output mesh.
This is the generation of waypoints directly from the modified mesh(es). Planners generally create waypoints directly on the surface of the input modified mesh(es). A ToolPathPlanner receives a mesh and returns a set of ToolPath objects.
The following sub-classes of tool path planners are currently supported:
Many robot processes require application specific changes or additions to a tool path. These include operations like order reorganization, pose offsets, approaches/departures, etc. Instead of building these changes directly into customized tool path planners, we implement them as a separate step in the pipeline. A ToolPathModifier takes in the output type of a ToolPathPlanner (i.e. ToolPaths) and returns a modified noether::ToolPaths object with these process-specific changes.
There should be a strong preference for constructing modifiers that have no additional effect when run repeatedly. Since some modifications (such as adding an extra raster) will not meet this requirement, it will only apply to a specialized subclass: OneTimeToolPathModifier.
As an example: While a ToolPathModifier could be implemented via a function that reverses the direction of odd-indexed rasters, running that function twice would undo the desired changes. Instead, a more desirable OneTimeToolPathModifier might set the direction of every even-indexed raster to the direction of the zero-indexed raster, and set the direction of every odd-indexed raster to the opposite. This would result in no additional change if run multiple times.

The image below shows the high-level architecture for the tool path planning components described in the sections above.
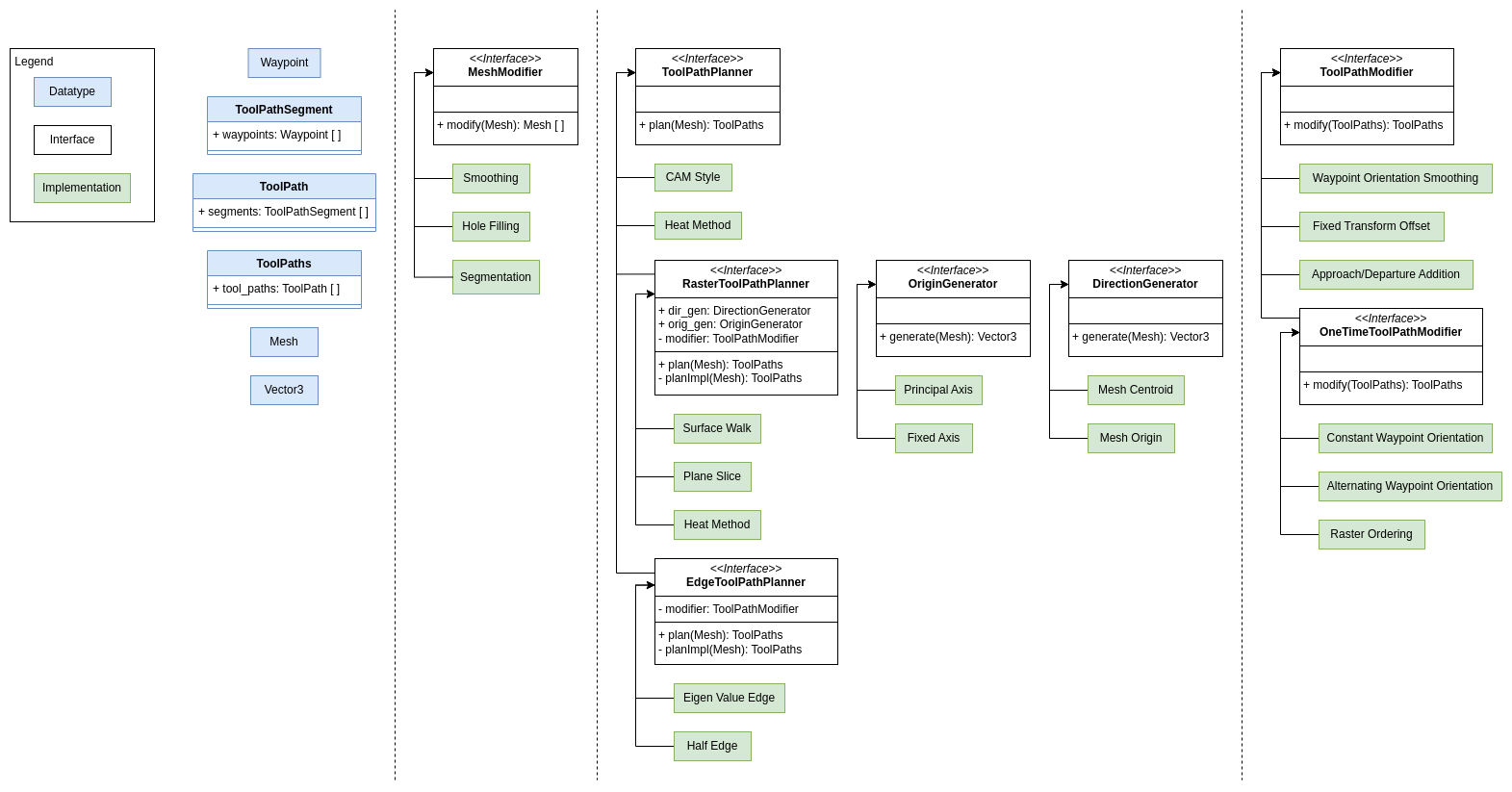
Custom behavior can be added by providing a class that overrides one of these defined interfaces. See the current implementations in Mesh Modifiers, Tool Path Planners, and Tool Path Modifiers for reference.