|
Noether
0.0.0
|
|
Noether
0.0.0
|
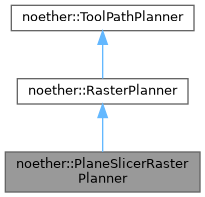
An implementation of RasterPlanner using a series of parallel cutting planes. More...
This implementation works best on approximately planar parts. The direction generator defines the direction of the raster cut. The cut normal (i.e., the raster step direction) is defined by the cross product of the cut direction and the smallest principal axis of the mesh.
#include <plane_slicer_raster_planner.h>
Public Member Functions | |
| PlaneSlicerRasterPlanner (DirectionGenerator::ConstPtr dir_gen, OriginGenerator::ConstPtr origin_gen) | |
| void | generateRastersBidirectionally (const bool bidirectional) |
 Public Member Functions inherited from noether::RasterPlanner Public Member Functions inherited from noether::RasterPlanner | |
| RasterPlanner (DirectionGenerator::ConstPtr dir_gen, OriginGenerator::ConstPtr origin_gen) | |
| ToolPaths | plan (const pcl::PolygonMesh &mesh) const override final |
| void | setLineSpacing (const double line_spacing) |
Protected Member Functions | |
| ToolPaths | planImpl (const pcl::PolygonMesh &mesh) const |
| Implementation of the tool path planning capability. | |
Protected Attributes | |
| bool | bidirectional_ = true |
| Flag indicating whether rasters should be generated in the direction of both the cut normal and its negation. | |
| Protected Attributes inherited from noether::RasterPlanner | |
| DirectionGenerator::ConstPtr | dir_gen_ |
| OriginGenerator::ConstPtr | origin_gen_ |
| double | line_spacing_ |
| Distance between raster lines. | |
Additional Inherited Members | |
| Public Types inherited from noether::ToolPathPlanner | |
| using | Ptr = std::unique_ptr< ToolPathPlanner > |
| using | ConstPtr = std::unique_ptr< const ToolPathPlanner > |
|
protectedvirtual |