#include <sys/stat.h>#include <lely/co/dcf.hpp>#include <lely/co/dev.hpp>#include <lely/co/obj.hpp>#include <lely/coapp/fiber_driver.hpp>#include <lely/coapp/master.hpp>#include <lely/coapp/sdo_error.hpp>#include <lely/ev/co_task.hpp>#include <lely/ev/future.hpp>#include <atomic>#include <condition_variable>#include <future>#include <memory>#include <mutex>#include <rclcpp/rclcpp.hpp>#include <string>#include <system_error>#include <thread>#include <vector>#include <boost/lockfree/queue.hpp>#include <boost/optional.hpp>#include <boost/thread.hpp>#include "canopen_core/exchange.hpp"
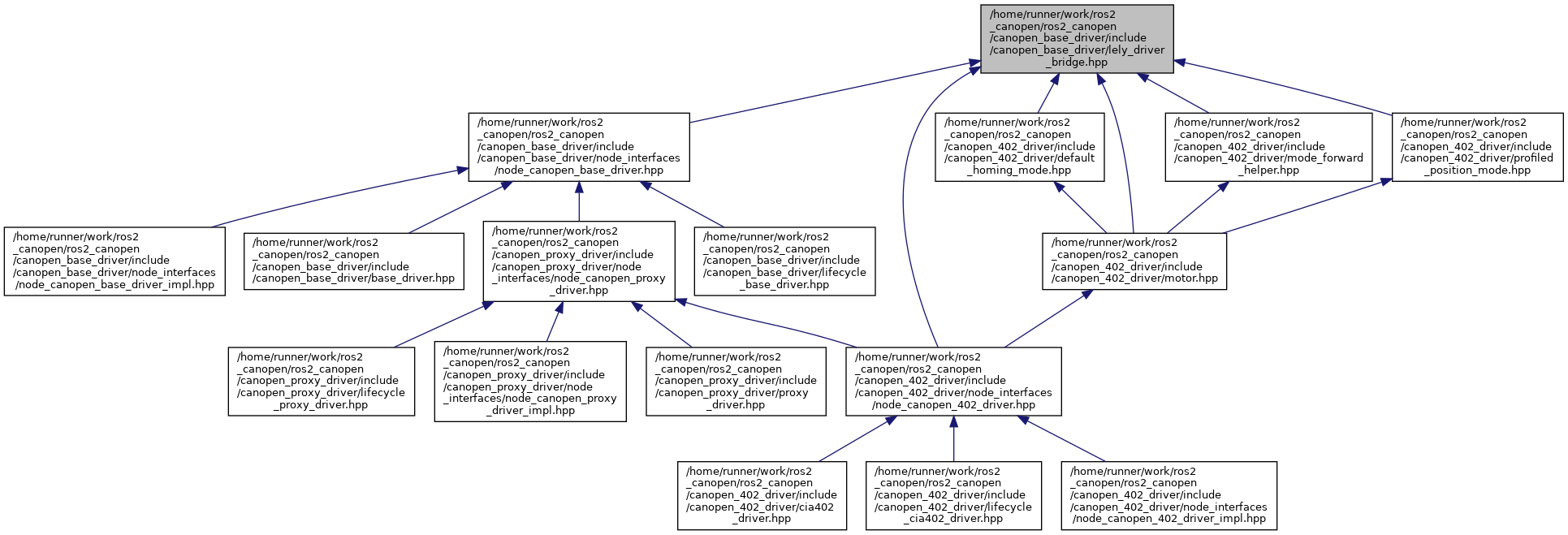
Include dependency graph for lely_driver_bridge.hpp:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | ros2_canopen::pdo_mapping |
| class | ros2_canopen::DriverDictionary |
| struct | ros2_canopen::LelyBridgeErrCategory |
| struct | std::is_error_code_enum< ros2_canopen::LelyBridgeErrc > |
| class | ros2_canopen::LelyDriverBridge |
| Lely Driver Bridge. More... | |
Namespaces | |
| namespace | ros2_canopen |
| namespace | std |
Typedefs | |
| typedef std::map< uint16_t, std::map< uint8_t, pdo_mapping > > | ros2_canopen::PDOMap |
Enumerations | |
| enum class | ros2_canopen::LelyBridgeErrc { ros2_canopen::NotListedDevice = 'A' , ros2_canopen::NoResponseOnDeviceType = 'B' , ros2_canopen::DeviceTypeDifference = 'C' , ros2_canopen::VendorIdDifference = 'D' , ros2_canopen::HeartbeatIssue = 'E' , ros2_canopen::NodeGuardingIssue = 'F' , ros2_canopen::InconsistentProgramDownload = 'G' , ros2_canopen::SoftwareUpdateRequired = 'H' , ros2_canopen::SoftwareDownloadFailed = 'I' , ros2_canopen::ConfigurationDownloadFailed = 'J' , ros2_canopen::StartErrorControlFailed = 'K' , ros2_canopen::NmtSlaveInitiallyOperational = 'L' , ros2_canopen::ProductCodeDifference = 'M' , ros2_canopen::RevisionCodeDifference = 'N' , ros2_canopen::SerialNumberDifference = 'O' , ros2_canopen::TimeOut = 'T' } |
Functions | |
| std::error_code | std::make_error_code (ros2_canopen::LelyBridgeErrc) |