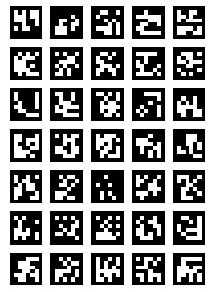
Structure containing relevant data for a ArUco grid target.
More...
Detects the corners of each ArUco marker in a grid as the features to use for calibration
- Pros:
- Straightforward to detect with minimal tuning
- Target can be partially occluded
- Cons:
- Less accurate than the ChArUco grid target finder since it lacks the chessboard features
- Theoretically less accurate than the modified circle grid target, but in practice the difference is negligible
#include <aruco_grid_target_finder.h>
|
| | ArucoGridTarget (const int rows, const int cols, const float aruco_marker_dim, const float marker_gap, const int dictionary_id=cv::aruco::DICT_6X6_250) |
| | Constructor.
|
| |
| | ArucoGridTarget (const cv::Ptr< cv::aruco::GridBoard > &board_in) |
| | Constructor.
|
| |
|
bool | operator== (const ArucoGridTarget &other) const |
| |
| virtual Correspondence2D3D::Set | createCorrespondences (const TargetFeatures2D &target_features) const override |
| | Creates a set of correspondences between the corners of each ArUco tag observed in an image (ordered clockwise from the "origin" corner) and their counterparts in the target (matched by ID)
|
| |
| virtual Correspondence< SENSOR_DIM, WORLD_DIM >::Set | createCorrespondences (const TargetFeatures< SENSOR_DIM > &target_features) const =0 |
| | Creates a set of correspondences between an input set of target features (e.g., identified in a 2D image) and the same features from the known geometry of the target.
|
| |
|
|
cv::Ptr< cv::aruco::GridBoard > | board |
| | Representation of the ArUco grid target.
|
| |
|
std::map< int, std::vector< Eigen::Vector3d > > | points |
| | Map of 3D ArUco tag corners with corresponding IDs.
|
| |
◆ ArucoGridTarget() [1/2]
| industrial_calibration::ArucoGridTarget::ArucoGridTarget |
( |
const int |
rows, |
|
|
const int |
cols, |
|
|
const float |
aruco_marker_dim, |
|
|
const float |
marker_gap, |
|
|
const int |
dictionary_id = cv::aruco::DICT_6X6_250 |
|
) |
| |
- Parameters
-
| rows | - number of rows in the target |
| cols | - number of columns in the target |
| aruco_marker_dim | - The length of the side of one ArUco marker (m) |
| marker_gap | - The size of the gap between adjacent arUco markers (m) |
| dictionary_id | - The dictionary of ArUco markers to use |
◆ ArucoGridTarget() [2/2]
| industrial_calibration::ArucoGridTarget::ArucoGridTarget |
( |
const cv::Ptr< cv::aruco::GridBoard > & |
board_in | ) |
|
- Parameters
-
| board_in | - OpenCV ArUco GridBoard object defining rows, columns, marker size, and marker spacing |
◆ createCorrespondences()
| Correspondence2D3D::Set industrial_calibration::ArucoGridTarget::createCorrespondences |
( |
const TargetFeatures2D & |
target_features | ) |
const |
|
overridevirtual |
- Parameters
-
| target_features | - Map of ArUco tag corners observed in an image |
- Returns
- Set of corresponding features in the image to features in the ArUco grid target
 Public Member Functions inherited from industrial_calibration::Target< SENSOR_DIM, WORLD_DIM >
Public Member Functions inherited from industrial_calibration::Target< SENSOR_DIM, WORLD_DIM >