Structure containing the necessary data to represent a modified circle grid target.
More...
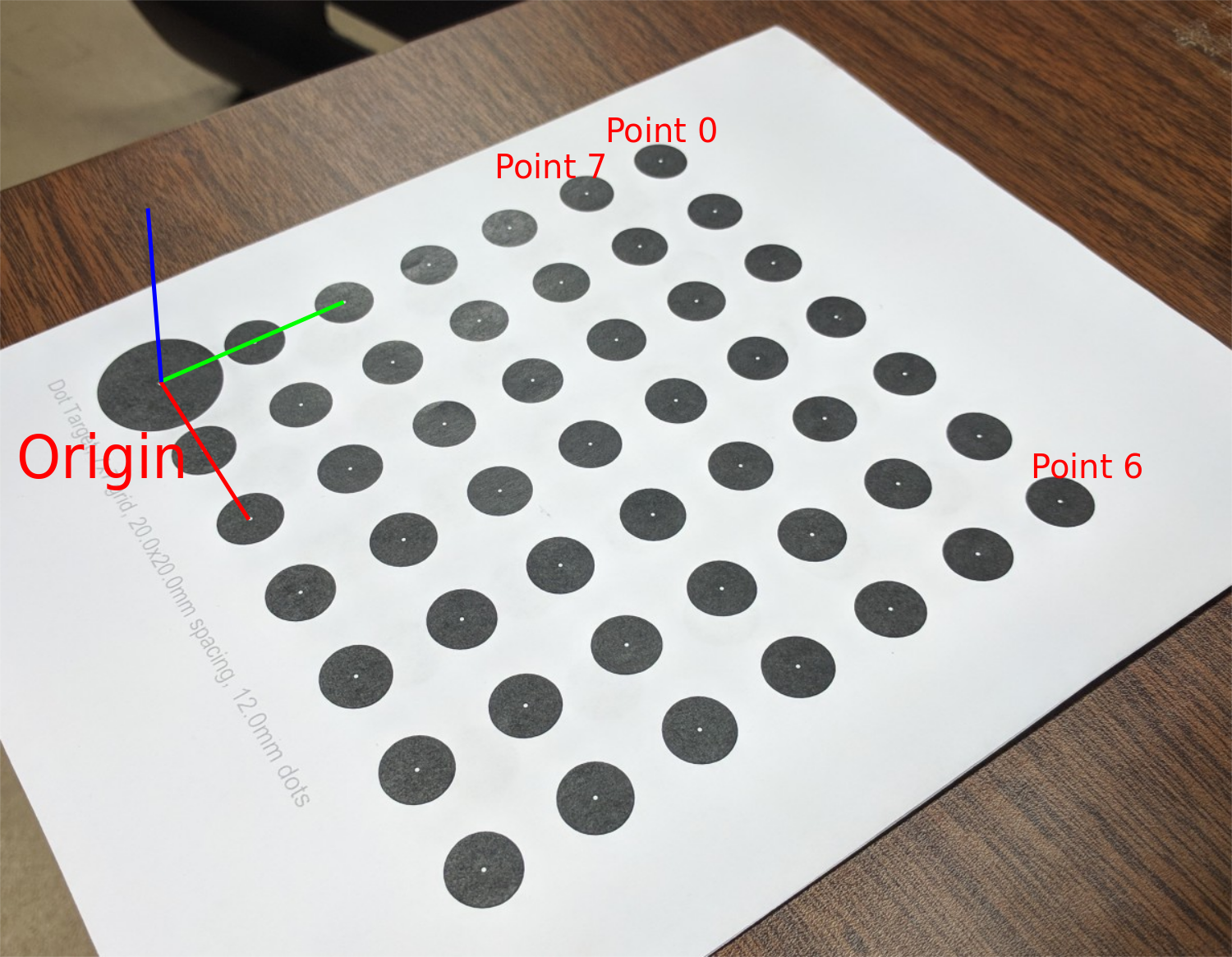
- The one big dot allows us to disambiguate the orientation of symmetrical targets.
- The big dot is the "origin" or (0,0,0) of the target. The +Z axis comes out of the page, the +X axis runs along the bottom of the page, left to right (the last row if your big dot is in the bottom left). The +Y runs up the page from the big dot.
- When using this target finder, the points are ordered left to right, top to bottom as if reading a book. The big dot, or origin, is in the bottom left. So the top left point is
0, the top right point is cols - 1, the second row first column is point cols, etc. See the image.
- Note
- You can create targets with custom size and spacing using the handy script,
calibration_target.py found in target_finders/opencv/script. Thanks to Jeremy Zoss for making this.
- Pros:
- Theoretically more accurate since the
- Cons:
- Entire target must be visible
- Detection requires tuning of many parameters
- The grid can frequently be identified in an incorrect order
#include <modified_circle_grid_target_finder.h>
|
| | ModifiedCircleGridTarget (const unsigned rows, const unsigned cols, const double spacing) |
| | Constructor.
|
| |
|
bool | operator== (const ModifiedCircleGridTarget &other) const |
| |
|
virtual Correspondence2D3D::Set | createCorrespondences (const TargetFeatures2D &target_features) const override |
| |
|
std::vector< Eigen::Vector3d > | createPoints () const |
| |
| virtual Correspondence< SENSOR_DIM, WORLD_DIM >::Set | createCorrespondences (const TargetFeatures< SENSOR_DIM > &target_features) const =0 |
| | Creates a set of correspondences between an input set of target features (e.g., identified in a 2D image) and the same features from the known geometry of the target.
|
| |
|
|
unsigned | rows |
| |
|
unsigned | cols |
| |
|
double | spacing |
| |
◆ ModifiedCircleGridTarget()
| industrial_calibration::ModifiedCircleGridTarget::ModifiedCircleGridTarget |
( |
const unsigned |
rows, |
|
|
const unsigned |
cols, |
|
|
const double |
spacing |
|
) |
| |
- Parameters
-
| rows | - Number of rows in the target |
| cols | - Number of columns in the target |
| spacing | - The spacing between adjacent circle centers (m) |
 Public Member Functions inherited from industrial_calibration::Target< SENSOR_DIM, WORLD_DIM >
Public Member Functions inherited from industrial_calibration::Target< SENSOR_DIM, WORLD_DIM >