Abstract Class for a CANopen Device Node. More...
#include <base_driver.hpp>
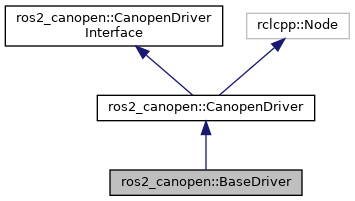
Inheritance diagram for ros2_canopen::BaseDriver:
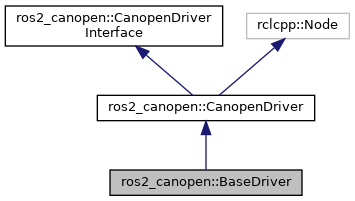
Collaboration diagram for ros2_canopen::BaseDriver:
Public Member Functions | |
| BaseDriver (rclcpp::NodeOptions node_options=rclcpp::NodeOptions()) | |
| void | register_nmt_state_cb (std::function< void(canopen::NmtState, uint8_t)> nmt_state_cb) |
| void | register_rpdo_cb (std::function< void(COData, uint8_t)> rpdo_cb) |
 Public Member Functions inherited from ros2_canopen::CanopenDriver Public Member Functions inherited from ros2_canopen::CanopenDriver | |
| CanopenDriver (const rclcpp::NodeOptions &node_options=rclcpp::NodeOptions()) | |
| virtual void | init () override |
| Initialise the driver. | |
| virtual void | set_master (std::shared_ptr< lely::ev::Executor > exec, std::shared_ptr< lely::canopen::AsyncMaster > master) override |
| Set the master object. | |
| virtual rclcpp::node_interfaces::NodeBaseInterface::SharedPtr | get_node_base_interface () override |
| Get the node base interface object. | |
| virtual void | shutdown () override |
| Shutdown the driver. | |
| virtual bool | is_lifecycle () override |
| Check whether this is a LifecycleNode. | |
| virtual std::shared_ptr< node_interfaces::NodeCanopenDriverInterface > | get_node_canopen_driver_interface () |
| Get the node canopen driver interface object. | |
Additional Inherited Members | |
| Public Attributes inherited from ros2_canopen::CanopenDriver | |
| std::shared_ptr< node_interfaces::NodeCanopenDriverInterface > | node_canopen_driver_ |
Detailed Description
Abstract Class for a CANopen Device Node.
This class provides the base functionality for creating a CANopen device node. It provides callbacks for nmt and rpdo.
Constructor & Destructor Documentation
◆ BaseDriver()
| ros2_canopen::BaseDriver::BaseDriver | ( | rclcpp::NodeOptions | node_options = rclcpp::NodeOptions() | ) |
Member Function Documentation
◆ register_nmt_state_cb()
|
inline |
◆ register_rpdo_cb()
|
inline |
The documentation for this class was generated from the following file:
- /home/runner/work/ros2_canopen/ros2_canopen/canopen_base_driver/include/canopen_base_driver/base_driver.hpp