|
Industrial Calibration
1.0.0
|
|
Industrial Calibration
1.0.0
|
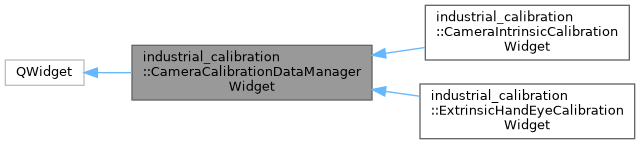
Widget for loading and managing a 2D image calibration data set. More...
This widget loads a 2D image calibration data set from a YAML file. The calibration data set is stored internally in the widget in a QTreeWidget. Each observation in the data set is stored as a QTreeWidgetItem, where the image file name is stored as data under the IMAGE_FILE_NAME_ROLE role and the pose file name is stored as data under the POSE_FILE_NAME_ROLE role. The observation QTreeWidgetItem has two child items:
The TargetFinder used for calibration and CameraIntrinsics must be also be configured in the widget in order to detect the calibration target in the images.
When an image is selected, this widget attempts to detect the Target in the image using the configured TargetDetector. If the target is found. the widget emits the imageSelected signal with an image where the target features are drawn on the image. Otherwise, the widget emits the imageSelected signal with the original observation image.
#include <camera_calibration_data_manager_widget.h>
Signals | |
| void | imageSelected (const QPixmap &image) |
| Signal emitted when an observation is selected in the tree widget. | |
Public Member Functions | |
| CameraCalibrationDataManagerWidget (QWidget *parent=nullptr) | |
| void | loadObservations (const std::string &observations_file) |
| Loads the calibration observations from file. | |
| QTreeWidget * | getTreeWidget () const |
Public Attributes | |
| QAction * | action_load_observations |
| QAction * | action_edit_target_finder |
| QAction * | action_edit_camera_intrinsics |
Protected Member Functions | |
| void | closeEvent (QCloseEvent *event) override |
| void | onLoadObservations () |
| void | loadTargetFinder () |
| void | drawImage (QTreeWidgetItem *item, int col) |
Protected Attributes | |
| Ui::CameraCalibrationDataManager * | ui_ |
| TargetFinderWidget * | target_finder_widget_ |
| CameraIntrinsicsWidget * | camera_intrinsics_widget_ |
| boost_plugin_loader::PluginLoader | loader_ |
| TargetFinderFactoryOpenCV::ConstPtr | factory_ |
| TargetFinderOpenCV::ConstPtr | target_finder_ |
| void industrial_calibration::CameraCalibrationDataManagerWidget::loadObservations | ( | const std::string & | observations_file | ) |
See the file formats for extrinsic hand eye calibration and camera intrinsic calibration
| Exception | on failure |
|
signal |
If the target can be identified in the image associated with the observation, the signal provides that image with the detected target drawn on it. Otherwise, the signal provides the original observation image.