|
Industrial Calibration
1.0.0
|
|
Industrial Calibration
1.0.0
|
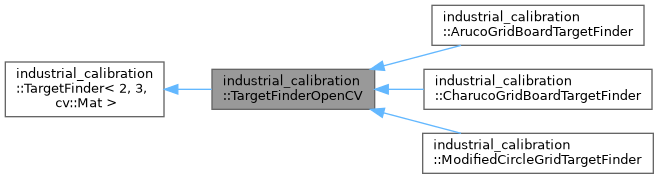
Typedef for a target finder based on OpenCV that finds 2D targets in an RGB image.
#include <target_finder.h>
Public Member Functions | |
| void | drawTargetOrigin (const cv::Mat &image, const TargetFeatures2D &features, const double axis_length=0.1) const |
| Draws the target origin X and Y axes on the image. | |
 Public Member Functions inherited from industrial_calibration::TargetFinder< 2, 3, cv::Mat > Public Member Functions inherited from industrial_calibration::TargetFinder< 2, 3, cv::Mat > | |
| virtual TargetFeatures< SENSOR_DIM > | findTargetFeatures (const cv::Mat &measurement) const=0 |
| Finds the features of the target in a sensor data measurement (e.g., 2D image) | |
| virtual cv::Mat | drawTargetFeatures (const cv::Mat &sensor_data, const TargetFeatures< SENSOR_DIM > &target_features) const |
| Draws the target features on an input sensor data measurement (e.g., a 2D image) | |
| virtual const Target< SENSOR_DIM, WORLD_DIM > & | target () const=0 |
| Returns the definition of the target used by the finder. | |
| Correspondence< SENSOR_DIM, WORLD_DIM >::Set | findCorrespondences (const cv::Mat &measurement) const |
| Finds correspondences from a sensor data measurement (e.g., 2D image) | |
| Correspondence< SENSOR_DIM, WORLD_DIM >::Set | findCorrespondences (const std::vector< cv::Mat > &measurements) const |
| Finds correspondences from a set of sensor data measurements (e.g., 2D images) | |
Additional Inherited Members | |
| Public Types inherited from industrial_calibration::TargetFinder< 2, 3, cv::Mat > | |
| using | Ptr = std::shared_ptr< TargetFinder > |
| using | ConstPtr = std::shared_ptr< const TargetFinder > |
| void industrial_calibration::TargetFinderOpenCV::drawTargetOrigin | ( | const cv::Mat & | image, |
| const TargetFeatures2D & | features, | ||
| const double | axis_length = 0.1 |
||
| ) | const |
This method computes the homography matrix between the detected target features and the known target features and uses it to project the X and Y axes of the target origin onto the image.